Control Design Examples
- Consider a plant described by Equation (1) with single input (i.e., ). The switching function is picked to be the linear combination
|
|

- where the weight for all . The sliding surface is the simplex where . When trajectories are forced to slide along this surface,
- and so
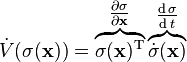
- which is a reduced-order system (i.e., the new system is of order because the system is constrained to this -dimensional sliding mode simplex). This surface may have favorable properties (e.g., when the plant dynamics are forced to slide along this surface, they move toward the origin ). Taking the derivative of the Lyapunov function in Equation (3), we have
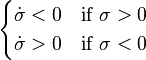
- To ensure is a negative-definite function (i.e., for Lyapunov stability of the surface ), the feedback control law must be chosen so that
- Hence, the product because it is the product of a negative and a positive number. Note that
|
|

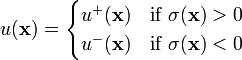
- The control law is chosen so that
- where
- is some control (e.g., possibly extreme, like "on" or "forward") that ensures Equation (5) (i.e., ) is negative at
- is some control (e.g., possibly extreme, like "off" or "reverse") that ensures Equation (5) (i.e., ) is positive at
- The resulting trajectory should move toward the sliding surface where . Because real systems have delay, sliding mode trajectories often chatter back and forth along this sliding surface (i.e., the true trajectory may not smoothly follow, but it will always return to the sliding mode after leaving it).
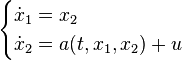
- Consider the dynamic system
-
- which can be expressed in a 2-dimensional state space (with and ) as
- Also assume that (i.e., has a finite upper bound that is known). For this system, choose the switching function
- By the previous example, we must choose the feedback control law so that . Here,
- When (i.e., when ), to make, the control law should be picked so that
- When (i.e., when ), to make, the control law should be picked so that
- However, by the triangle inequality,
- and by the assumption about ,
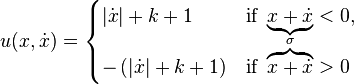
- So the system can be feedback stabilized (to return to the sliding mode) by means of the control law
- which can be expressed in closed form as
- Assuming that the system trajectories are forced to move so that, then
- So once the system reaches the sliding mode, the system's 2-dimensional dynamics behave like this 1-dimensional system, which has a globally exponentially stable equilibrium at .
Read more about this topic: Sliding Mode Control
Famous quotes containing the words control, design and/or examples:
“Only one thing is certain: if pot is legalized, it won’t be for our benefit but for the authorities’. To have it legalized will also be to lose control of it.”
—Germaine Greer (b. 1939)
“Westerners inherit
A design for living
Deeper into matter—
Not without due patter
Of a great misgiving.”
—Robert Frost (1874–1963)
“It is hardly to be believed how spiritual reflections when mixed with a little physics can hold people’s attention and give them a livelier idea of God than do the often ill-applied examples of his wrath.”
—G.C. (Georg Christoph)