Definition

where
- is a real-valued vector of nx independent variables,
- are N vectors of the same size as (often called centers) that the interpolated curve shall pass
- are the N weights of the basis functions.
- are the nx+1 weights of the polynomial.
- The linear polynomial with the weighting factors improves the interpolation close to the "boundary" and especially the extrapolation "outside" of the centers . If this is not desired, this term can also be removed (see also figure below).
The basis functions of polyharmonic splines are radial basis functions of the form:
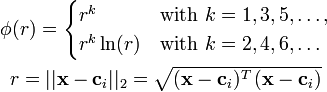
Other values of exponent k are not useful (such as ), because a solution of the interpolation problem might no longer exist. To avoid problems at r=0 (since ln(0) = -∞), the polyharmonic splines with the natural logarithm might be implemented as:

The weights and are determined such that the function passes through given points (i=1,2,...,N) and fulfill the orthogonality conditions:

To compute the weights, a symmetric, linear system of equations has to be solved:
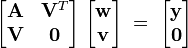
where

Under very mild conditions (essentially, that at least nx+1 points are not in a subspace; e.g. for nx=2 that at least 3 points are not on a straight line), the system matrix of the linear system of equations is nonsingular and therefore a unique solution of the equation system exists.
Once the weights are determined, interpolation requires to just evaluate the top most formula for the provided .
Many practical details to implement and use polyharmonic splines are given in the book of Fasshauer. In Iske polyharmonic splines are treated as special cases of other multiresolution methods in scattered data modelling.
Read more about this topic: Polyharmonic Spline
Famous quotes containing the word definition:
“It’s a rare parent who can see his or her child clearly and objectively. At a school board meeting I attended . . . the only definition of a gifted child on which everyone in the audience could agree was “mine.””
—Jane Adams (20th century)
“It is very hard to give a just definition of love. The most we can say of it is this: that in the soul, it is a desire to rule; in the spirit, it is a sympathy; and in the body, it is but a hidden and subtle desire to possess—after many mysteries—what one loves.”
—François, Duc De La Rochefoucauld (1613–1680)
“Perhaps the best definition of progress would be the continuing efforts of men and women to narrow the gap between the convenience of the powers that be and the unwritten charter.”
—Nadine Gordimer (b. 1923)