Note
- This page uses standard physics notation. For spherical coordinates, is the angle between the z axis and the radius vector connecting the origin to the point in question. is the angle between the projection of the radius vector onto the x-y plane and the x axis. Some sources reverse the definitions of and, so the meaning should be inferred from the context.
- The function atan2(y, x) can be used instead of the mathematical function arctan(y/x) owing to its domain and image. The classical arctan(y/x) has an image of (-π/2, +π/2), whereas atan2(y, x) is defined to have an image of (-π, π]. (The expressions for the Del in spherical coordinates may need to be corrected)
| Operation | Cartesian coordinates (x,y,z) | Cylindrical coordinates (ρ,φ,z) | Spherical coordinates (r,θ,φ) | Parabolic cylindrical coordinates (σ,τ,z) |
|---|---|---|---|---|
| Definition of coordinates |
 |
 |
 |
 |
 |
 |
 |
 |
|
| Definition of unit vectors |
 |
 |
 |
 |
 |
 |
 |
 |
|
| A vector field | ||||
| Gradient |  |
 |
 |
|
| Divergence |  |
 |
||
| Curl |  |
 |
 |
 |
| Laplace operator |  |
 |
 |
|
| Vector Laplacian |  |
 |
||
| Material derivative
|

|

|
 |
|
| Differential displacement | ||||
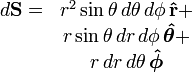
| Differential normal area |  |
 |
 |
 |
| Differential volume | ||||
Non-trivial calculation rules:
|
||||
 (using Lagrange's formula for the cross product)
(using Lagrange's formula for the cross product)Read more about this topic: Del In Cylindrical And Spherical Coordinates
Famous quotes containing the word note:
“For do but note a wild and wanton herd
Or race of youthful and unhandled colts
Fetching mad bounds, bellowing and neighing loud,
Which is the hot condition of their blood;
If they but hear perchance a trumpet sound,
Or any air of music touch their ears,
You shall perceive them make a mutual stand,
Their savage eyes turned to a modest gaze
By the sweet power of music.”
—William Shake{peare (1564–1616)
“... if we look around us in social life and note down who are the faithful wives, the most patient and careful mothers, the most exemplary housekeepers, the model sisters, the wisest philanthropists, and the women of the most social influence, we will have to admit that most frequently they are women of cultivated minds, without which even warm hearts and good intentions are but partial influences.”
—Mrs. H. O. Ward (1824–1899)
“In it he proves that all things are true and states how the truths of all contradictions may be reconciled physically, such as for example that white is black and black is white; that one can be and not be at the same time; that there can be hills without valleys; that nothingness is something and that everything, which is, is not. But take note that he proves all these unheard-of paradoxes without any fallacious or sophistical reasoning.”
—Savinien Cyrano De Bergerac (1619–1655)